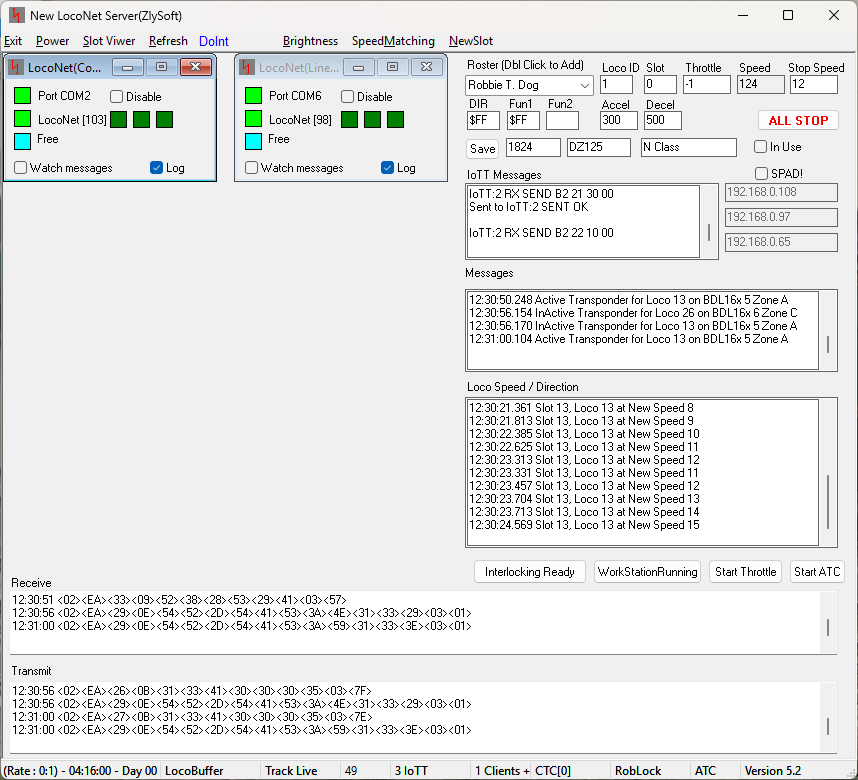
Netserver
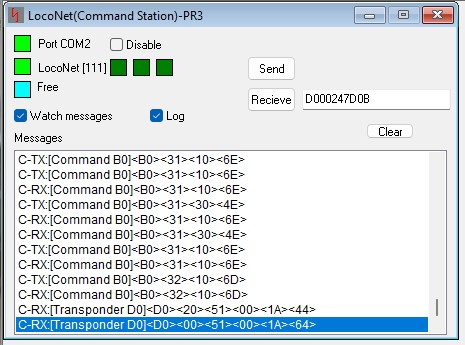
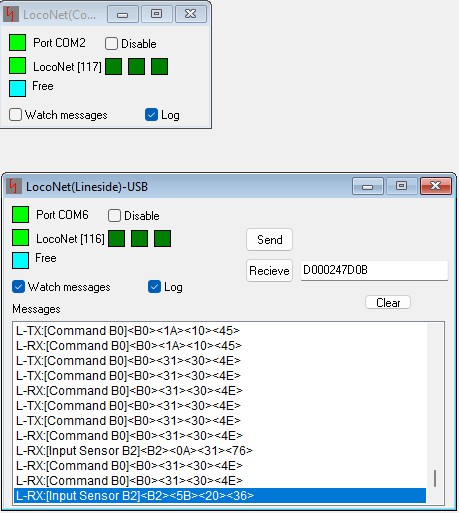
The Digitrax DCC system utilizes a network called 'Loconet' which allows for communication between the 'Command Station' and various track side modules.
These modules can be from any manufacturer provided they have a 'LocoNet' interface.
Module's include:
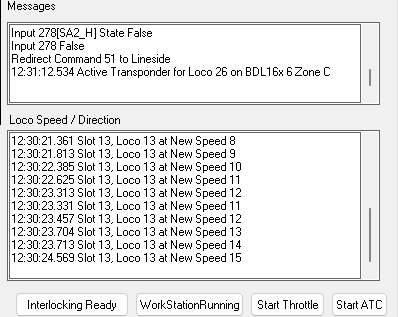
Occupancy Detectors - These provide an indication of loco, or rolling stock(with resistor wheel sets) in a specific track section.
Point Controller - These provide a means of operating point motors.
Short Circuit Detectors - These provide a means of detecting short circuits in specified area's so as to keep other areas operational.
Input/Output Devices - hese provide a means of setting outputs and reading inputs of connected equipment (Signals, Points, Level Crosings, Lights)
Servo Controllers - Thes provide a means of controlling Servo motors to operate points semafore signals and crossing gates
PC Serial Interface - Provides a means of connecting a PC